
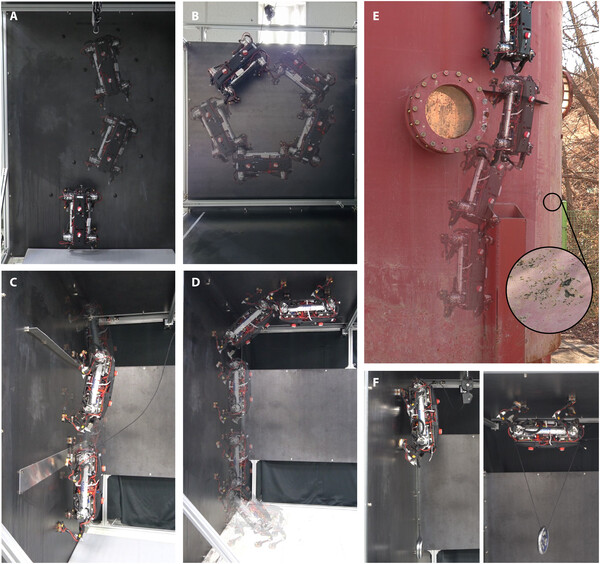
[디지털비즈온 이호선 기자] 4족 보행로봇이 90도의 벽면을 오르고, 천장도 거꾸로 기어오르고 이동하며, 장애물을 피한 보행을 실시한다.
카이스트(KAIST·한국과학기술원) 연구진이 미끄러운 철제 벽면을 기어오를 수 있는 네다리 보행 로봇을 개발했다. 1초당 70㎝를 이동하는 속도로, 세계 최고 수준이다. 이 로봇은 천장에 거꾸로 매달려 떨어지지 않고도 보행하는 데 성공했다.
26일 카이스트에 따르면 박해원 기계공학과 교수 연구팀은 최근 국제학술지 '사이언스 로보틱스'에 이같은 로봇 연구 성과를 발표했다.
KAIST(한국과학기술원)와 미국 일리노이대학 어바나 샴페인교에 소속된 연구자들이 발표한 논문 'Agile and versatile climbing on ferromagnetic surfaces with a quadrupedal robot'은 금속제 건물과 구조물의 벽과 천장을 올라갈 수 있는, 자기를 띤 다리를 가지는 작업용 4족 보행 로봇을 제안한 연구 보고다.
카이스트 연구팀은 미끄럽거나 거친 표면을 이동하려면 발바닥의 흡착력을 자유자재로 조절할 수 있어야 한다고 봤다. 연구팀은 이를 위해 발바닥에 '영전자석'과 '자기유변탄성체'를 적용했다.
영전자석은 매우 짧은 시간 전류를 흘려보내 전자기력을 끌어올리거나 낮출 수 있는 자석이다. 자기유변탄성체는 고무 재질의 합성수지에 철가루와 같은 인자를 섞은 탄성체를 일컫는다.
저장 탱크나 교량, 조선소 등의 검사에서는 벽면이나 천장, 틈새 등의 환경하에서 작업하는 경우가 많다. 이러한 작업 환경은 인간이 직접 접근하기가 어렵고 위험한 경우도 적지 않습니다. 이러한 좁고 복잡한 3차원 환경에서, 다리식 로봇은 다양한 동작을 수행할 수 있다.
기존 로봇은 이같은 환경에서 이동성이 제한되는 한계가 있었다. 또 미끄럽거나 거친 표면에선 로봇이 다양한 움직임을 수행하기 어려웠다.
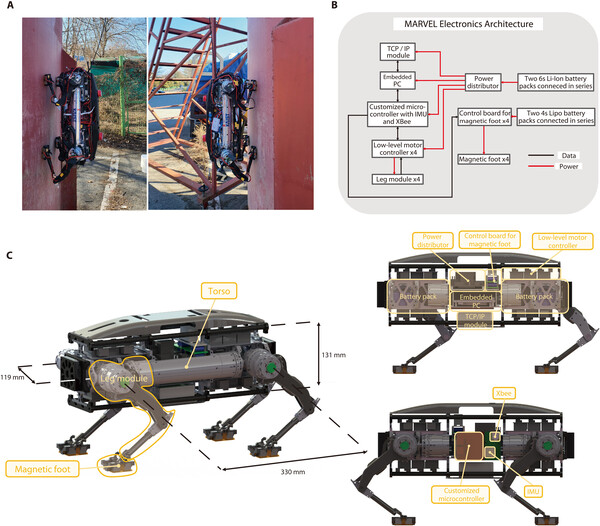
로봇은 'MARVEL'이라 불리며 4족보행 로봇 전체 무게는 8㎏으로, 발바닥 무게는 169그램(g)에 불과하다. 동체의 폭, 높이, 길이는 각각 119×131×330mm(전면 고관절에서 후면 고관절까지)이다.
수직 흡착력은 535뉴턴(N), 마찰력은 445뉴턴(N)을 나타냈다. 이는 각각 수직 방향에서 약 54킬로그램(㎏), 수평 방향에서 약 45㎏의 외력을 가해도, 발바닥이 떨어지지 않고 견뎌낸다.
이러한 운동 태스크를 실현하기 위해, 자기 점착력의 발생과 제거를 저소비 전력으로 순간에 실시할 수 있는 'S-EPM' 약간의 유지력을 희생하여 큰 전단 유지력을 실현하는 'MRE 풋 패드' 그리고 다리가 미끄러지거나 넘어지지 않고 로봇이 3차원 공간을 다이나믹하게 이동할 수 있는 컨트롤러를 갖춘 액추에이터의 시너지적인 조합으로 되어 있다.
다리에는 자성 엘라스토머와 전자석이 모두 사용되고 있으며, 이 두 가지를 조합하여 로봇의 발이 필요에 따라 자화하거나 소자를 할 수 있다. 자기의 온·오프를 전환하는 것으로, 1개의 다리가 벽의 수직인 장소에 달라붙어, 다른 다리가 붙은 채로 고정되어, 1개씩 다리를 떼어 걸을 수 있게 된다.
동작에 있어서 대상체는 평면뿐만 아니라, 돌기물 등의 장애물이 포함되어 있기 때문에, 이들을 회피하여 진행해야 한다. 거기서 연구팀은, 고양이가 전진하기 전에 앞발로 작은 한 걸음을 내디뎌, 확인 후에 뒷발의 동작을 더한다는, 노면을 시험하는 동작을 시뮬레이션했다. 앞발로 확인하고 나서 어떻게 진행할지를 결정하고 있는 셈이다.
평가 실험에서는, 금속의 벽을 올라가 천장을 걷는 동작을 확인했다. 또한 벽이 오렌지색으로 녹슬어진 오래된 옥외 저장의 곡면 탱크에서 테스트 한 결과 먼지와 페인트로 덮여 있었지만 돌기물과의 충돌을 피하고 장애물을 극복하면서 탱크 표면 위의 이동에 성공했다. 또, 3kg까지의 짐을 탑재할 수 있는 것도 판명했다.