[디지털비즈온 이호선 기자] 캘리포니아 대학 샌디에이고(UCSD)의 엔지니어들은 두족류에서 영감을 얻어 제트 추진력을 갖춘 소프트 수중 로봇을 개발했다.
UCSD 연구진에 따르면 소프트 로봇은 민감한 물체 주변에서 작업하거나, 구조화되어 있지 않은 환경에서 작업할 때 유용성을 제공한다. 하지만 소프트 로봇은 수중에서 동작할 때 빠른 이동이 힘들다.
두족류는 제트 추진력과 '추가된 질량' 효과를 활용해 골격없이도 물속에서 빠르게 움직일 수 있다. 로봇 공학자들은 오징어는 제트 추진 메커니즘 덕분에 어떤 수생 무척추 동물보다 가장 빠른 속도에 도달할 수 있다는 아이디어를 착안했다.
수중로봇은 피부와 유연한 갈비뼈에 탄성 에너지를 저장하면서 몸에 일정량의 물을 흡수한후, 몸을 압축하여 이 에너지를 방출하고 물을 분사하여 스스로를 추진하는 원리다.

논문의 선임 저자이자 UC 샌디에이고의 기계 및 항공 우주 공학과 교수인 Michael T. Tolley는 “본질적으로 우리는 오징어가 고속 수영에 사용하는 모든 주요 기능을 재현했다. "이것은 오징어와 같이 빠른 이동을 위해 제트 펄스를 생성할 수 있고 몸 모양을 변경하여 이러한 제트 펄스를 얻을 수 있는 최초의 밧줄이 없는 로봇으로 수영 효율을 향상시킨다."고 말했다.
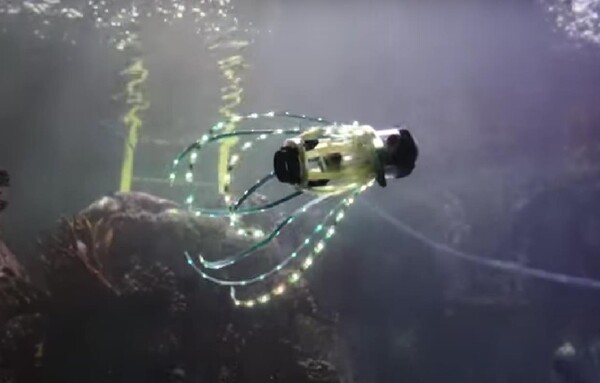
이 오징어 로봇은 주로 아크릴 폴리머와 같은 부드러운 재료로 만들어졌으며 몇 가지 단단한 3D 인쇄 및 레이저 절단 부품으로 구성 되어있다. 휴지 상태의 오징어 로봇은 대략 제등 모양을 하고 있으며 측면을 따라 스프링처럼 작동하는 유연한 갈비뼈가 있다.
리브는 로봇의 각 끝에 있는 두 개의 원형 플레이트에 연결되며 그들 중 하나는 물을 흡수하고 로봇의 몸이 수축할 때 물을 배출하는 노즐에 연결된다. 다른 판에는 방수 카메라나 다른 유형의 센서를 넣을 수 있다.
로봇의 속도를 초당 약 18~32센티미터(약 시속 0.5마일)로 최대 평균추력 0.19N, 평균 및 최고 수영속도는 각각 18.4cm/s과 32.1cm/s이다. 이 수중로봇 기술은 연구 결과는 '생체모사와 생체모방공학'(Bioinspiration and Biomimetics) 저널에 소개됐다.