
[디지털비즈온 김맹근 기자] 2020년에 캘리포니아 공과대학(California Institute of Technology) 연구원인 Mory Gharib와 Alireza Ramezani는 변형 로봇을 개념화했다. Caltech는 오늘 향후 NASA 화성 탐사선 임무의 일부가 될 수 있는 Multi-Modality Mobility Morphobot(M4)을 발표했다.
Robotics247의 로봇공학 연중무휴 직원에 따르면, M4 Morphobot은 엣지 인공지능과 로봇 공학을 위한 NVIDIA Jetson 플랫폼으로 구동된다. 연구소 에서는 이 로봇이 기술의 조합을 통해 날고, 운전하고, 걷고, 8가지 순열 동작을 수행할 수 있기 때문에 이 로봇을 M4라고 불렀다.
Caltech(캘리포니아 공과대학)의 항공학 및 생물 영감 공학 교수인 Gharib는 블로그 게시물에서 "우리가 원하는 기능의 수가 늘어났다."라고 말했다. "처음에 디자인팀에 제안했을 때 다들 '아니요'라고 했다."
ASA JPL은 개발을 계속한다
Caltech는 초기 연구에 자금을 지원했다. NASA와 JPL (제트추진연구소)은 다음 단계에 자금을 지원하고 이를 더욱 발전시키기 위해 지난 여름 Northeastern University의 전기 및 컴퓨터 공학과 조교수인 Ramezani를 JPL의 연구원으로 영입했다.
이 팀에는 현재 Gharib와 Ramezani, 그리고 Caltech의 항공우주 분야 박사후 연구원인 Eric Sihite가 포함되어 있다. JPL의 Arash Kalantari; Caltech 자율 시스템 및 기술 센터(CAST)의 설계 엔지니어인 Reza Nemovi이다.
M42 버전은 현재 NASA에서 화성 탐사선 후보로 개발 중입니다. 미국 교통부도 관심을 표명했다고 Gharib는 말했다.
“NASA에서 우리는 지금 착륙 중 변형에 대한 테스트를 받고 있다.”라고 그는 말했다.
그리고 최근 Nature Communications에 이에 대한 논문을 발표한 이후 Gharib은 제안이 넘쳐났다고 말했다.
"우리는 그것이 어떻게 갑자기 그렇게 많은 관심을 받았는지 어리둥절하다"라고 그는 말했다. "다양한 조직이 서로 다른 일을 하고 싶어하며 우리에게 접근하고 있다."
M4는 소방, 수색 및 구조 작전에 대한 잠재력을 가지고 있다.
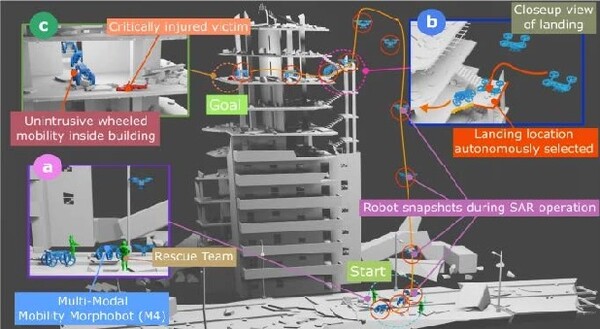
논문을 작성한 Caltech 팀은 M4가 수색 및 구조 분야의 다양한 임무 요구사항을 위해 설계되었다고 말했다. 예를 들어, 화재 지역과 같은 지역으로 굴러가거나 걸어 들어가는 것이 불가능할 때 로봇은 카메라와 센서를 사용하여 상황을 평가하기 위해 비행하고 정찰을 수행할 수 있다.
Gharib에 따르면 로스앤젤레스 지역의 여러 소방서가 M4에 관심을 가지고 Gharib에 연락했다.
“최초 대응자에게는 안전한 지역에 착륙한 다음 상황으로 운전해야 하기 때문에 이는 엄청난 일이다.”라고 그는 말했다.
드론으로 '낮은 과일' 배달
Caltech 팀은 M4를 사용하여 드론 배송과 관련된 문제를 해결하기 위해 노력하고 있다고 말했다. Gharib에 따르면 드론 배송은 이 로봇의 "낮은 성과"라고 했다.
전통적인 배송용 드론은 안전상의 이유로 집이나 회사 근처에 드론이 착륙하는 것을 원하지 않기 때문에 문제가 있다고 말했다. M4는 사람들과 격리된 곳에 착륙한 다음 배송을 완료하기 위해 운전할 수 있어 더 안전한 옵션이 될 수 있다고 그는 덧붙였다.
M4는 또한 트럭 배달이 진입하기 어렵거나 배달 서비스를 전혀 제공할 수 없는 지역으로 날아갈 수 있다고 Gharib은 말했다.
그는 “트럭배달이 갈수 없는 곳이 많다”고 말했다.
현재 M4는 최고 시속 40마일의 속도로 주행할 수 있으며, 배터리는 한번 충전하면 최대 30분 동안 지속된다. 그러나 Caltech 팀은 더 긴 비행시간, 더 큰 탑재량 및 더 긴 이동 거리를 갖춘 더 큰 드론을 설계하기 위해 노력하고 있다. “무한한데”라고 말했다.